Semi-supervised Mesh Segmentation and Labeling
Authors: Jiajun Lv, Xinlei Chen, Jin Huang, Hujun Bao
Computer Graphics Forum, 31 (7) , 2012 (Pacific Graphics 2012)
Abstract
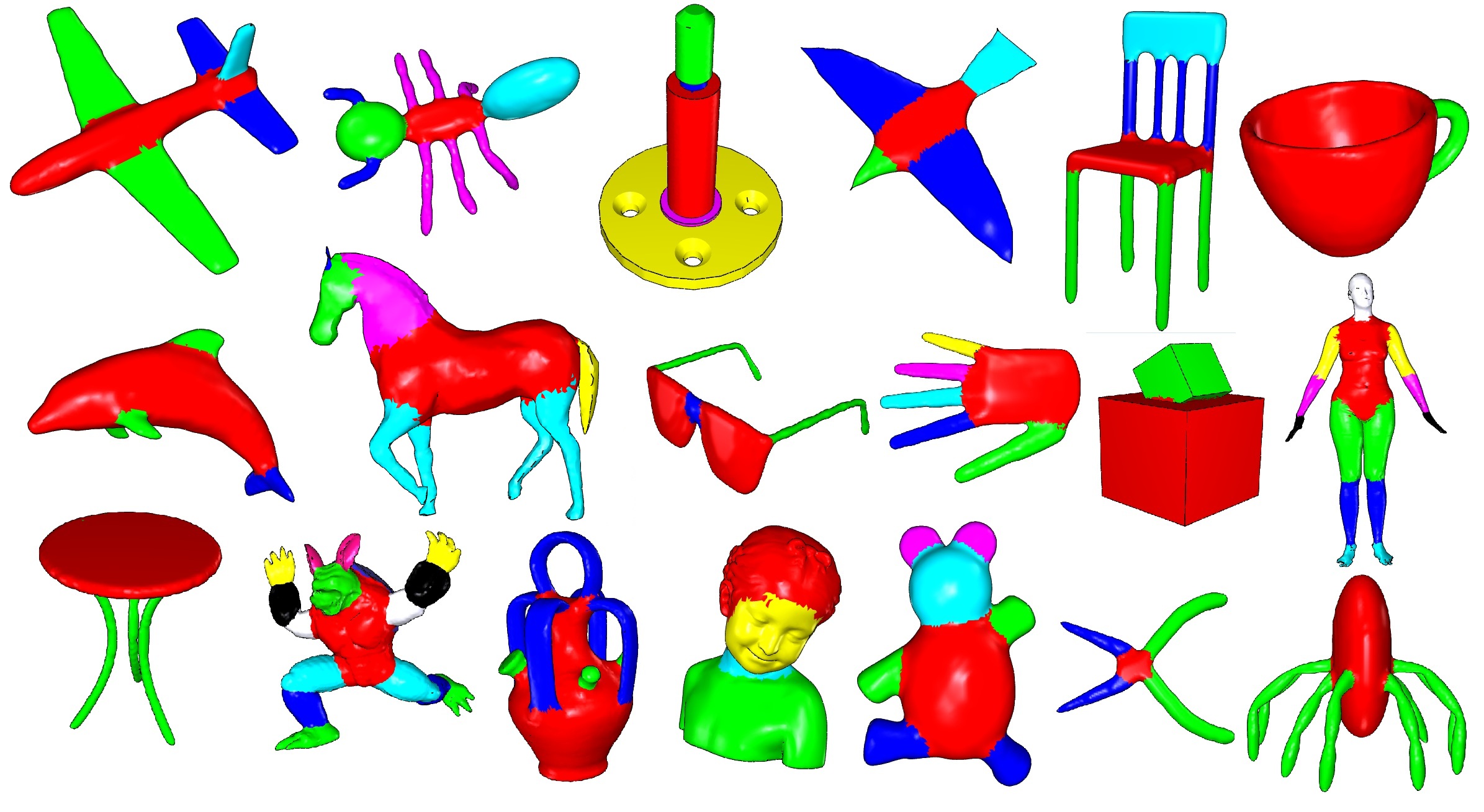
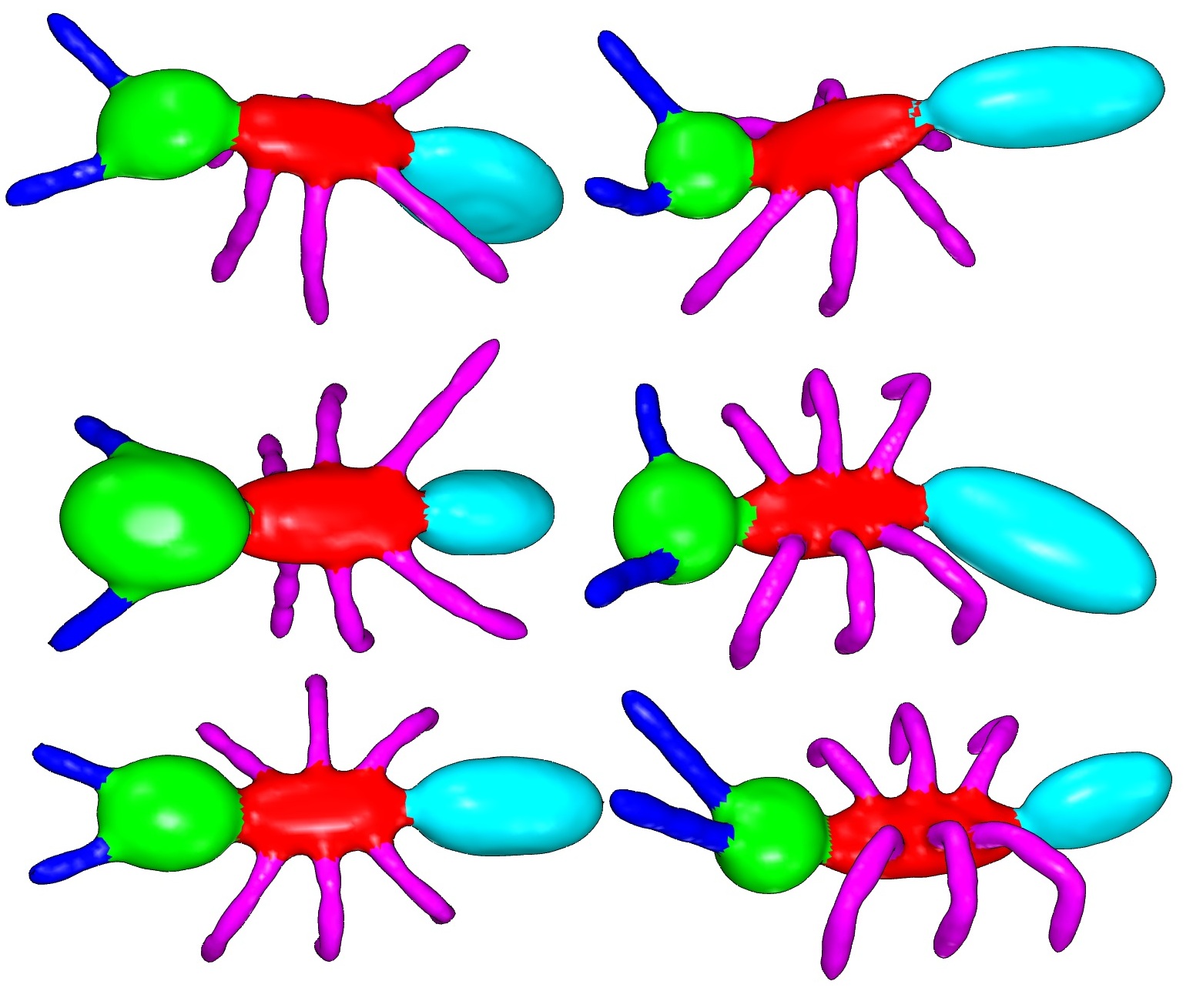
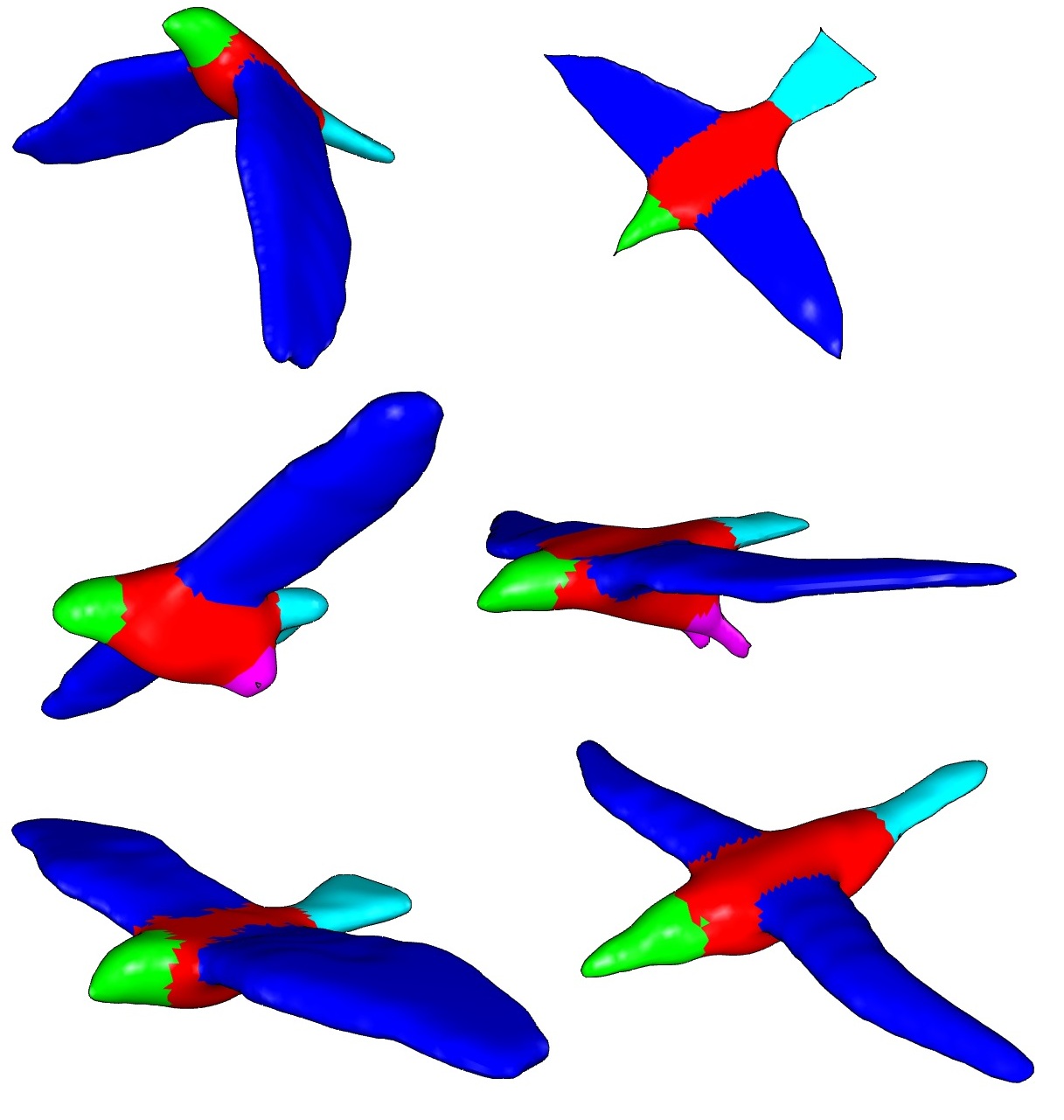
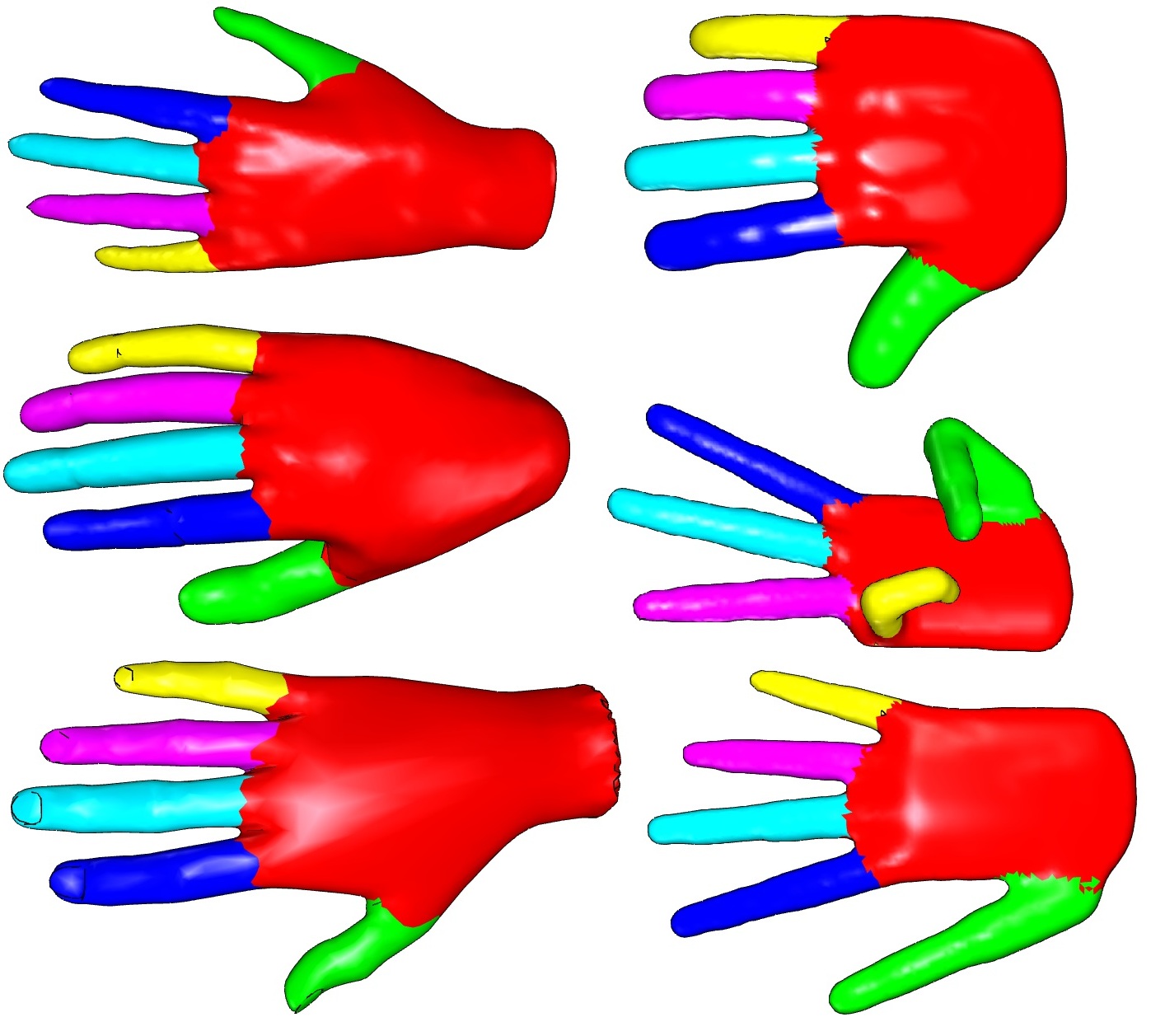
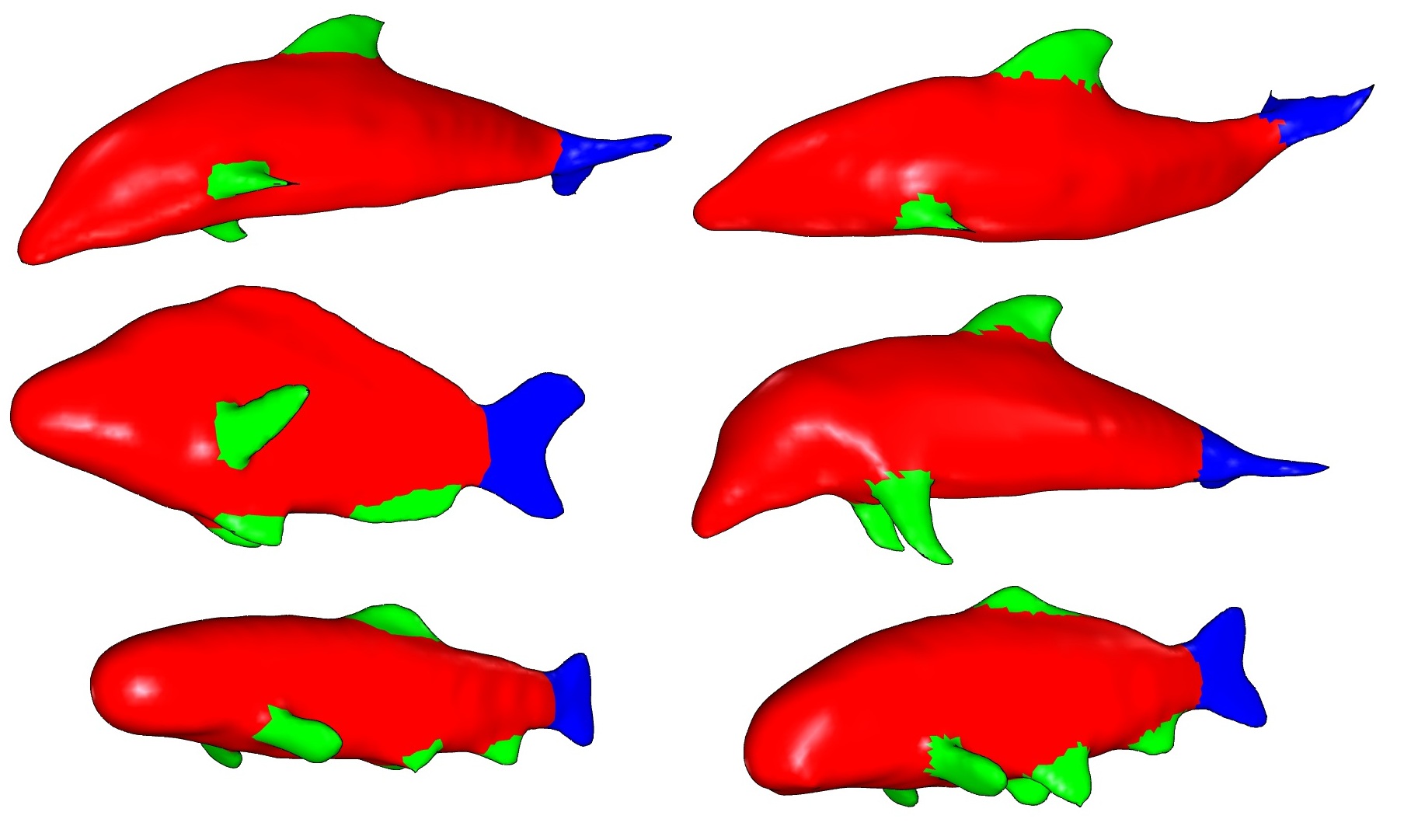
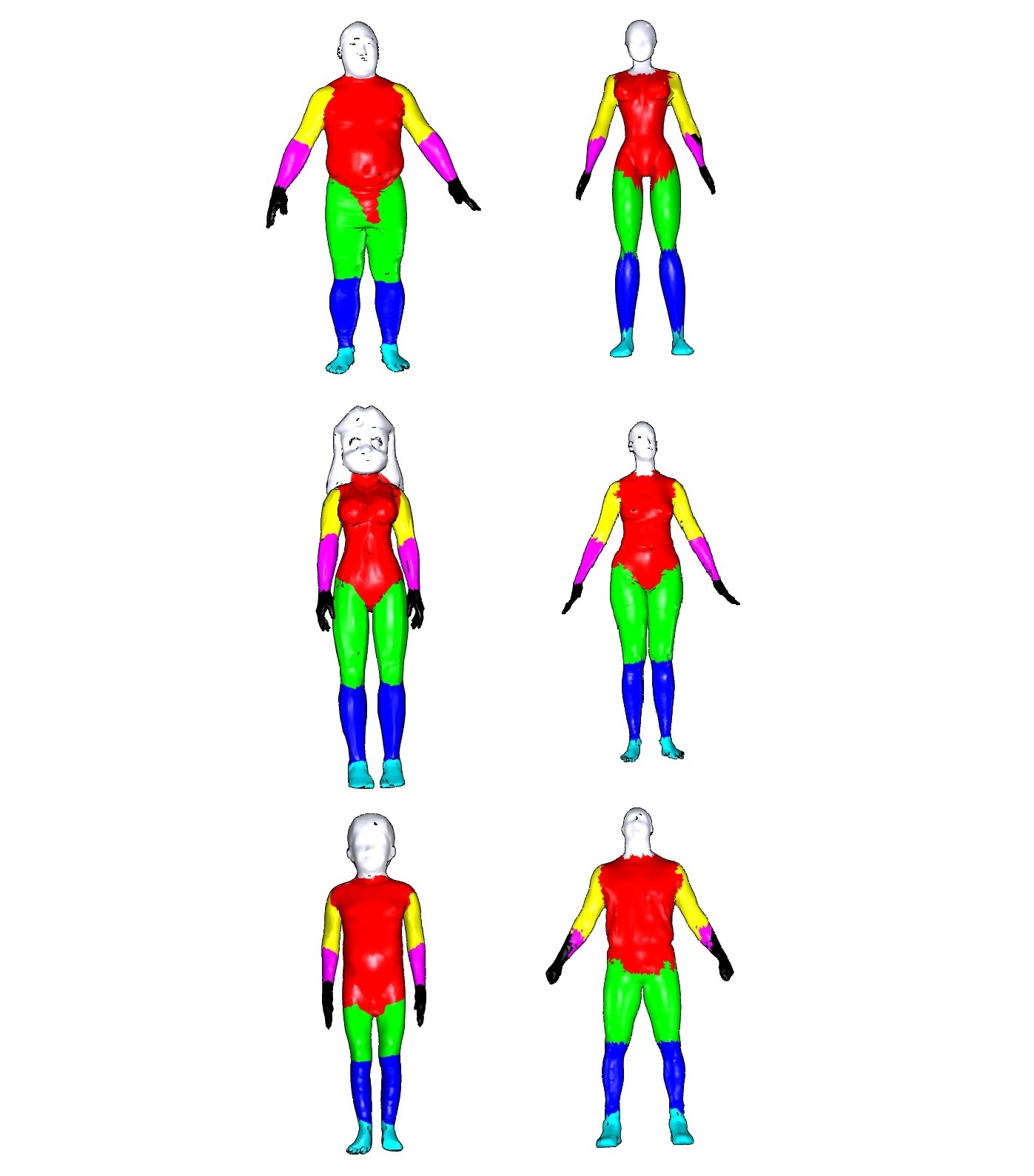
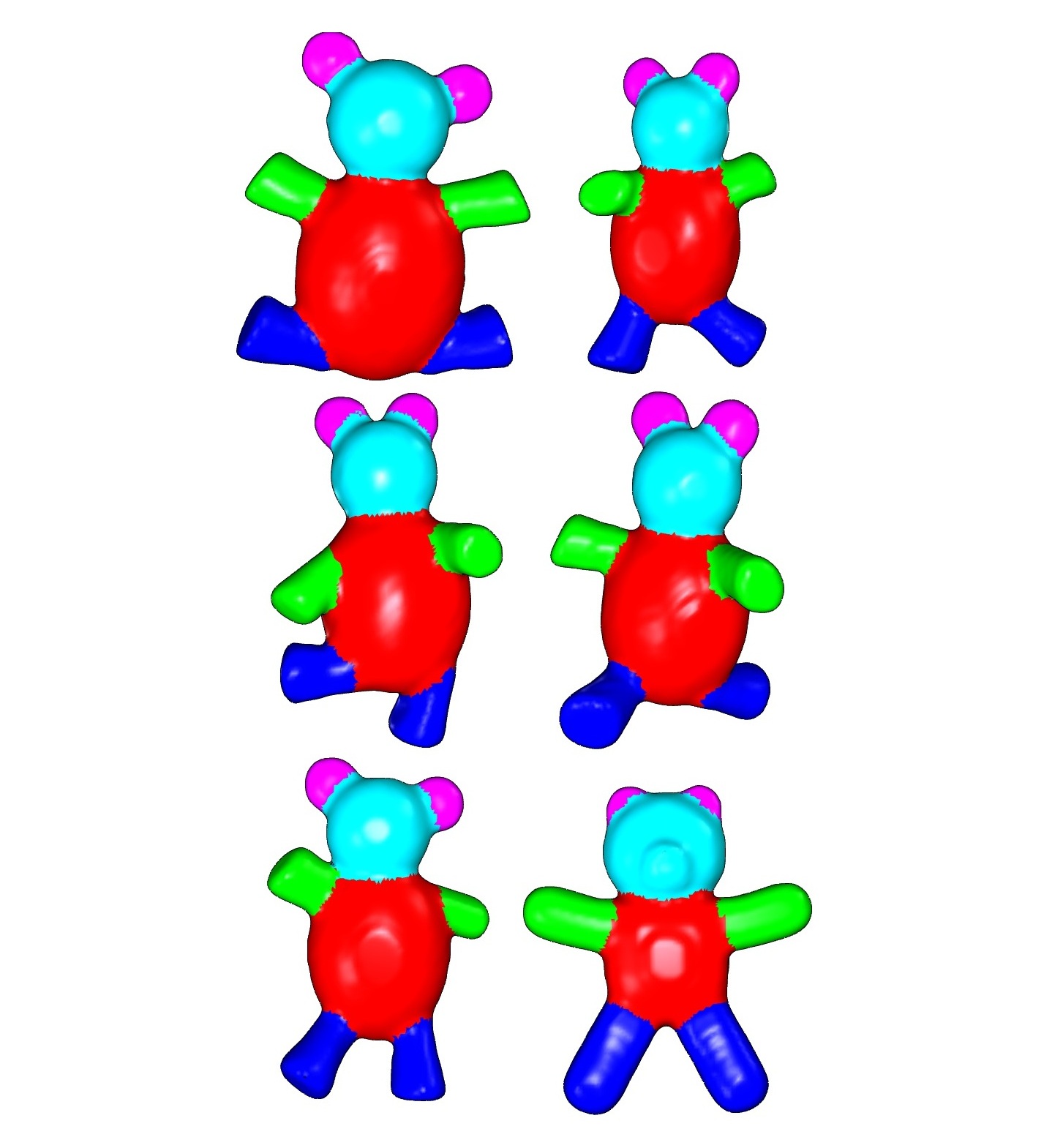
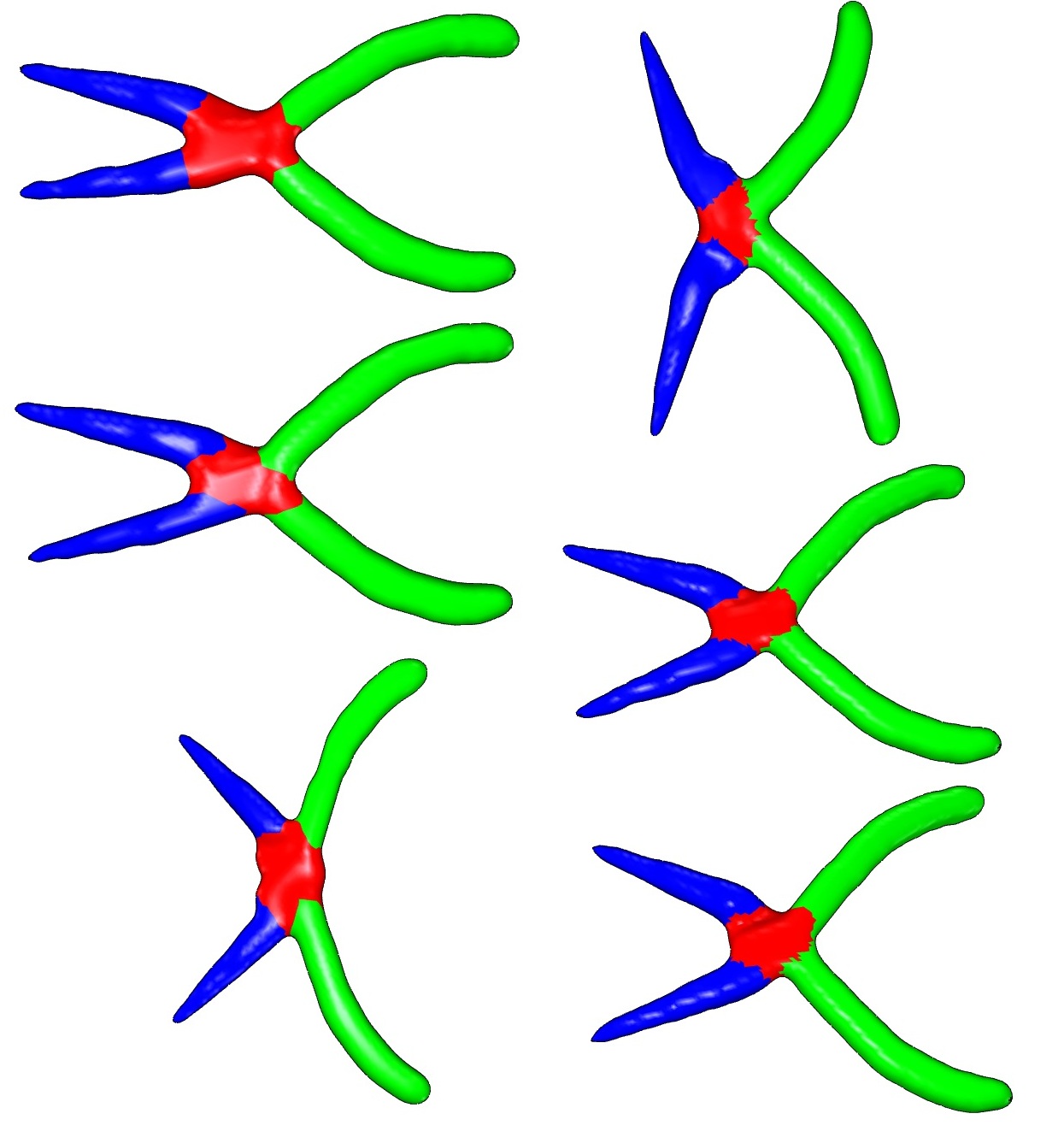
Recently, approaches have been put forward that focus on the recognition of mesh semantic meanings. These methods usually need prior knowledge learned from training dataset, but when the size of the training dataset is small, or the meshes are too complex, the segmentation performance will be greatly effected. This paper introduces an approach to the semantic mesh segmentation and labeling which incorporates knowledge imparted by both segmented, labeled meshes, and unsegmented, unlabeled meshes. A Conditional Random Fields (CRF) based objective function measuring the consistency of labels and faces, labels of neighbouring faces is proposed. To implant the information from the unlabeled meshes, we add an unlabeled conditional entropy into the objective function. With the entropy, the objective function is not convex and hard to optimize, so we modify the Virtual Evidence Boosting (VEB) to solve the semi-supervised problem efficiently. Our approach yields better results than those methods which only use limited labeled meshes, especially when many unlabeled meshes exist. The approach reduces the overall system cost as well as the human labelling cost required during training. We also show that combining knowledge from labeled and unlabeled meshes outperforms using either type of meshes alone.
Results

Downloads
Paper: Download 2.89M
Presentation: Download 2.84M
Acknowledgements
This work was partially supported by China 973 Program (No.2009CB320801), NSFC (No. 61170139 and 60933007), the National High Technology Research and Development (863) Program of China (No.2012AA011503). We would also like to thank the anonymous reviewers for their valuable comments and suggestions.
Feedback
Please send email to us if you have any questions.